Overview
 View on GitHub
View on GitHubAn operating system is a program that manages the computer hardware. It also provides a basis for application programs and acts as an intermediary between computer user and the computer hardware.
What Operating Systems Do
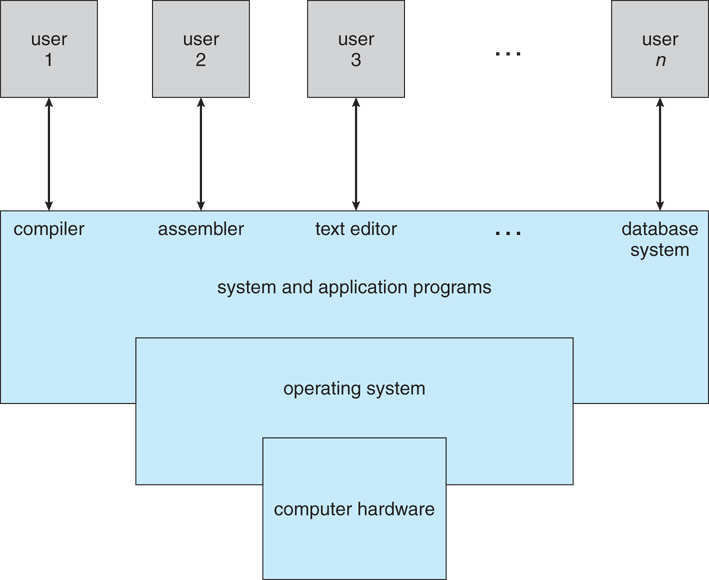
A computer system has four main components: hardware, operating system, application programs, and users. The operating system provides the means for proper use of these resources in the operation of the computer system.
User View
In terms of a user, the operating system is designed mostly for ease of use, with some attention paid to performance and none paid to resource utilization.
System View
From the computer's point of view, the operating system is the program most intimately involved with the hardware. In this context, the operating system can be viewed as a resource allocator.
A different view of an operating system emphasizes the need to control the various I/O devices and user programs. An operating system is a control program that manages the execution of user programs to prevent errors and improper use of the computer.
Defining the Operating System
A common definition is that the operating system is the one program running at all times on the computer-usually called the kernel
Computer System Organization
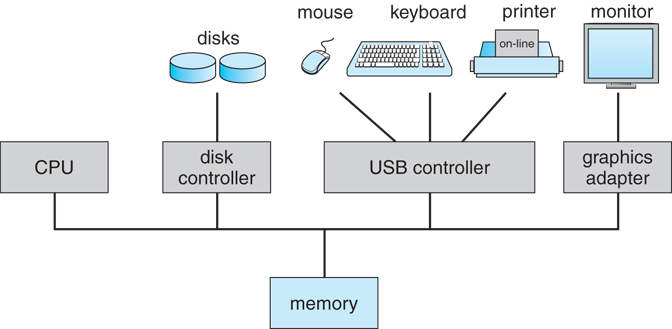
A modern computer system consists of one or more CPUs and several device controllers connected through a common bus that provides access to shared memory.
When a computer first boots up it runs a bootstrap program, which is typically stored in the ROM. This bootstrap program initializes all aspects of the computer system. For that it loads up the kernel.
The occurrence of an event is signaled by an interrupt from either the hardware or the software. Hardware can trigger an interrupt at anytime by sending a signal to the CPU using the system bus. However, for software, an interrupt is triggered by executing a special operation called a system call (also called monitor call).
Storage Structure
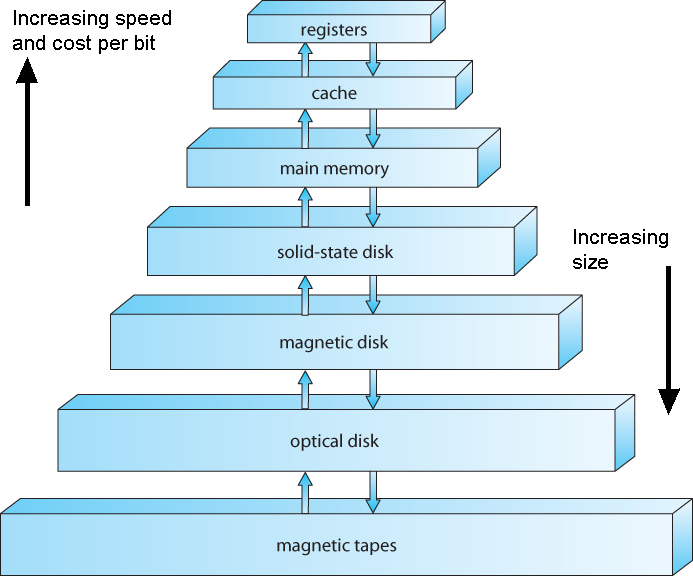
CPUs only load instructions from memory. Most computers store their instructions in the RAM also known as the main memory. Static programs are stored in ROM. Interactions between the storage devices are done through a sequence of load and store instructions. The load instruction moves a word from main memory to an internal register within the CPU, whereas the store instruction moves the content of a register to main memory. Aside from this, the CPU automatically loads instructions from the main memory.
Most computers also use secondary storage because the main memory is too small, and it loses its contents on power loss.
Examples of storage can be found below, where storage devices underneath 'electronic disk' are secondary and above it are examples of main memory.
I/O Structure
A large portion of the OS-code is dedicated to I/O, both because of its importance to the reliability and performance of a system and because of the varying nature of the devices.
A computer system consists of CPUs and multiple device controllers that are connected through a common bus. The device controller is in charge of moving data between the peripheral devices that it controls and its local buffer storage. An operating system has a device driver for each device controller.
To start an I/O operation,
- the device driver loads the appropriate registers within the device controller
- Using this the controller determines what action to take.
- The controller then starts the transfer of data from the device to its local buffer.
- Once the data has been transferred, the controller informs the device driver using an interrupt that it has finished its operation.
- The device driver then returns control to the operating system. Sometimes it returns the data back or a pointer is created if the operation was read.
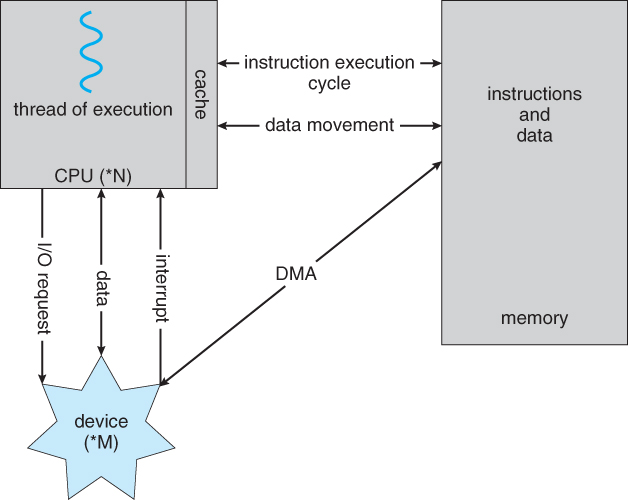
This form of I/O is fine for moving small amounts of data, but it can produce high overhead when used for bulk data movement such as disk I/O. To solve this problem direct memory access (DMA) is used. After setting up buffers, pointers and counters for the I/O device, the device controller transfers an entire chunk of data directly to or from its own buffer storage directly to the memory, with no intervention by the CPU. Only one interrupt is generated in this case to tell the device driver the operation is completed. The CPU can still carry on with other work while DMA is being used.
Computer-System Architecture
Single-Processor Systems
Most systems use a single processor. On a single-processor system, there is one CPU capable of executing a general-purpose instruction set, including instructions from user processes.
Multiprocessor Systems
Multiprocessor systems (a.k.a parallel systems or tightly coupled systems) have two or more processors in close communication, sharing the computer bus and sometimes the clock, memory, and peripheral devices.
These systems have three main advantages:
- Increased throughput: Having processors doesn't speed up the productivity times.
- Economy of scale: Multiprocessor systems can cost less then equivalent multiple single processor systems, because they share peripherals, mass storage and power supplies.
- Increased reliability: If one processor fails then the others can distribute the work.
There are two types of multiprocessor systems used today:
- asymmetric multiprocessing, where a master processor schedules and allocates work to its slave processors.
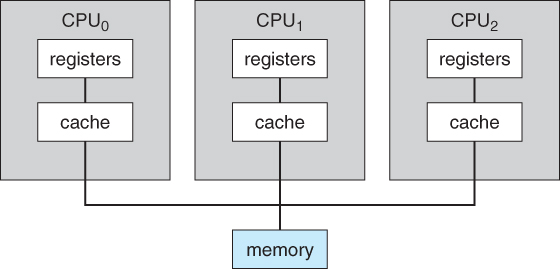
- symmetric multiprocessing (SMP), where each processor does all the tasks, and are peers to one another. An example below.
Clustered Systems
Like multiprocessor systems, clustered systems gather together multiple CPUs, however they are composed of two or more individual systems or nodes. The general definition is that clustered computers share storage and are closely linked via a local-area network (LAN).
Clustering can be structured in two ways:
- asymmetric clustering: one machine is in hot-standby mode while the other is running the applications. The hot-standby host machine does nothing but monitor the activity server. If that server fails the hot-standby host machine becomes the active server.
- symmetric mode: two or most hosts are running applications and are monitoring each other. This is more efficient as all the hardware is being used, however this requires that more than one application is available to run.