Digital Data Communication Techniques
 View on GitHub
View on GitHubSynchronization
Loss of synchronization:
- in practice two data/digital signals are not equal. The result is that the timing of the receiver may slowly drift relative to the received signal.
Solution:
- data is sent in bit sequences called frames
- the receiving clock is started at the beginning of each bit sequence
Example:
- a frame consists of 11 bits
- assume that the synchronization at the start of the first bit is late at most 10% of
Fulfill the following 2 conditions:
and
These are satisfied if:
Asynchronous Transmission
- timing or synchronization must only be maintained within each character; the receiver has the opportunity to resynchronize at the beginning of each new character
- timing requirements are modest, sender and receiver are synchronized at the beginning of every character (8 bits if ASCII)
- high overhead
- overhead
Synchronization Transmission
In this mode, blocks of characters or bits are transmitted. Each block begins with a preamble and ends with a postamble
2 types:
- character-oriented
- bit-oriented
Character-oriented
- the frame consists of a sequence of characters
- SYN is a unique bit pattern that signals the receiver the beginning of a book
- the receiver having detected the beginning of the block reads the information till it finds the postamble
- the receiver having received the preamble, looks fo extra information regarding the length of the frame
Bit oriented
- in this mode, the frame treated as a sequence of bits. Neither data nor control information is interpreted in units of x-bit characters
- a special bit pattern indicates the beginning of a frame
- the receiver looks for the occurrence of the flag
Dealing with presence of errors
- Detect presence of errors (error detection)
- Try to correct them (error correction)
- If no correction have the mechanism to request retransmission (use of Automatic Repeat Request)
Random Errors
- An error occurs when a bit is altered between transmission and reception
- Random, statistically uniformly spread errors
- occurrence of an error does not increase the probability that other bits, close to the one in error, while be in error
- white noise is producing such errors
- For low BER and frames of "reasonable" length, most framers would experience no error or 1 error at most
- example: BER = and length of frame = 8000 bits
- probability of receiving a frame correctly > 0.992
- probability of a frame having a single error = 0.007873
- probability of having more than 1 error < 0.000127
Burst Errors
- occurrence of an error having occurred in the sequence, means bits preceding/following the one in error have higher probability than the average bit error probability to be in error
- error strings (clusters of error bits closely located in the sequence) form
- some channel related impairments producing error bursts
- impulsive noise
- "slow" fading/shadowing in wireless (relevance of bit rate to average time/distribution channel attenuation remains below certain level)
- effect greater at higher data rates
Error detection and control
The objective is to detect and correct errors that occur in the transmission of frames.
Types of errors
- Lost frame
- a frame that the receiver does not receive (e.g., because starting/clock extraction is not achieved due to excessive signal attenuation, increased levels of noise..)
- damaged frame
- a frame that receiver receives, but some of its bits are in error
Error detection
- adds redundancy to transmitted message
- can deduce original despite some errors
- Example: block error correction code
- map bit input onto an bit codeword
- each distinctly different
- if get error assume codeword sent was closest to that received
- means have reduced effective data rate
- most of the work concerning error correction & detection is making use of Galois field algebra
Code rate & minimum distance
Code rate = # of information bits in a block / # of total bits in a block = .
The bandwidth expansion .
The energy per channel bit is related to energy per information bit () through .
Minimum distance (): minimum number of positions in which any 2 codewords differ.
Correctable and detectable errors
- A block code can correct at least errors if , , then . If there is only one error in the block, it can be corrected.
- A block code can detect any error pattern if the received bits do not correspond to a codeword.
- If there are errors in the n-bits codeword, the existence of errors is detected with certainty if
- However, even when , many of the corrupted blocks can still be detected
- Out of the possible -bit combinations, only codewords can be generated, thus, there are prohibited combinations
- Above statement applies when no error correction is used
Parity Check
- value of parity bit is such that character has even (even parity) or odd(odd parity number of ones)
- even number of bit errors goes undetected
Longitudinal Redundancy Checks

Cyclic Redundancy Check
- Based on cyclic error-correcting codes
- For a block of -bits the transmitter generates bit sequence
- insert redundancy in the codeword
- Transmitter transmits the bits
- Receiver uses error detection process to decide if there were errors in the received sequence or otherwise.
Cyclic codes
- cyclic code is a block code, where the circular shifts of each codeword gives another codeword that belongs to the code
- they are error-correcting codes having algebraic properties that are convenient for efficient error correction & detection
Fundamentals CRC coding
- CRC codes treat bit strings as representations of polynomials with coefficients of 0 and 1 only (modulo 2 arithmetic)
- Polynomial arithmetic is done modulo 2
- subtraction and addition are similar to XOR
- division is similar to the one in decimal except the subtraction is done modulo 2
- Make sure you are familiar with mod2 arithmetic/algebra
Basic idea:
- the sender and receiver agree upon "a generator polynomial", , in advance
- the sender appends a checksum (corresponds to the redundancy bits) to the end of the (only data) frame, represented by the polynomial, in a way that the polynomial , representing the {data + checksum bits} frame, is divisible by
- Upon receipt of the frame, the receiver (generates and) divides by using mod 2 division
- is the polynomial corresponding to the received sequence
- if there is a remainder, there has been transmission error
How to compute the checksum
- if is the degree of , then append zero to the low order end of the frame; the resulting frame corresponds to the polynomial .
- Divide into using mod 2 division
- : divisor; : remainder
- Subtract the remainder from using mod 2 subtraction/addition
- The result is the checksumed frame's polynomial, T(x)

CRC Error Detection
- let us assume that some transmission errors occur
- instead of receiving , the receiver will receive .
- If there are k "1" bits in , then k bit errors have occurred (probably)
- the receiver computes
- if contains two or more terms, (i.e. ) all single errors will be detected
- single-bit error means , where
Single error
- where
- if no bit errors occur
- if only the -th bit of the -bit long frame is reversed ; the large the value of is, the more significant the location of the bit within the frame is)
- Error will be detected if
- For , and Error is not detected
- For , and Error is detected
Line Configuration
- Topology
- refers to physical arrangement of stations on the medium
- two topologies are commonly used
- point-to-point
- multi-point
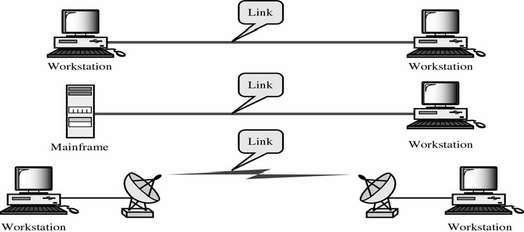
Point-to-point
- two stations
- traditionally mainframe computer and terminals
- between two routers / computers
- separate transmission line from the computer to each terminal
- the computer must have an I/O port for each terminal
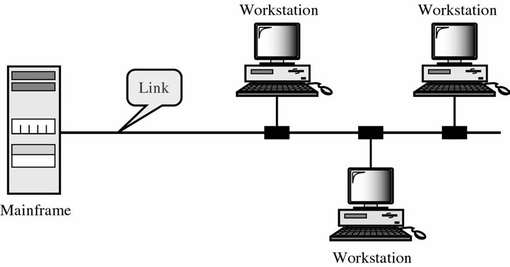
Multi-point
- typically, a local area network (LAN)
- a single "line" is needed
- the computer needs only single I/O port
- eg. Ethernet, Token Ring, WiFi
Duplex
- classify data exchange as half or full Duplex
- half duplex (two-way alternate)
- only one station may transmit at a time
- requires one data path
- full duplex (two way simultaneous)
- simultaneous transmission and reception between two stations
- requires two data paths
- separate media or frequencies used for each direction
- or echo canceling